
Cette semaine, j’ai continué à étudier les transformations nécessaires pour amener un sommet positionné dans l’espace du modèle 3D, sur notre écran 2D.
Avec la connaissance de la transformation de projection dans notre poche, nous pouvons enfin parler de l’espace de découpage et du NDC (coordonnées normalisées). Pour comprendre ces sujets, nous aurons également besoin de voir des coordonnées homogènes.
Une révision de la caméra perspective
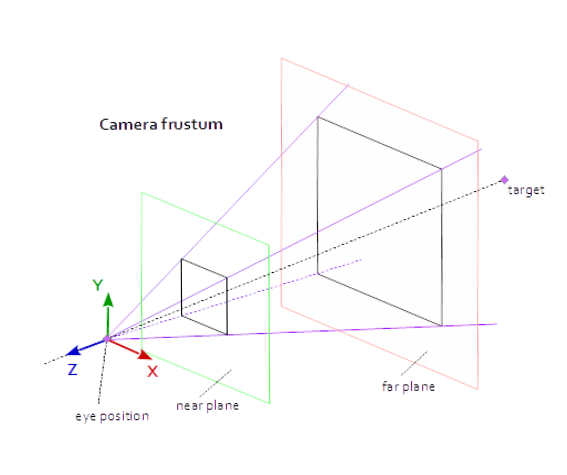
Rappelons que la caméra perspective est modélisée comme une pyramide tronquée qui s’appelle le frustum de vue.
Ce frustum se compose de quelques parties qui doivent être définies afin de créer notre matrice de projection. Voici ces parties :
- Plan near (proche) - c’est la distance au
nearplan de clipping à travers l’axe z négatif (dans espace de la caméra) - Plan far (lointain) - c’est la distance au
farplan de clipping à travers l’axe z négatif (dans espace de la caméra) - Champ de vision (fov_y) - c’est l’angle entre les côtés en haut et en bas du frustum.
- Le rapport d’aspect - c’est le rapport d’aspect de notre fenêtre.
La distance entre les plans near et far doit être aussi courte que possible pour minimiser le problème de précision du tampon de profondeur, ou, autrement dit, pour empêcher le z-fighting.
💡 Comment calculer la matrice de projection d’une caméra perspective
Faisons ce calcul en supposant que notre scène utilise une caméra perspective. Rappelons qu’il y a une différence entre la modélisation d’une caméra perspective et d’une caméra orthographique.
Avec gl-matrix, notre travail est très simple. On doit juste passer quelques paramètres à la méthode comme suit :
const aspect = this._context.canvas.width / this._context.canvas.height;
const projectionMatrix = mat4.create();
const fov_y = (2 * Math.PI) / 5
const near = 1
const far = 100
mat4.perspective(projectionMatrix, fov_y, aspect, near, far);
S’il y a une chance où vous auriez besoin de construire la matrice vous-même, ce ne sera pas trop mal :
Notez bien qu’il y a un -1 dans la position de la matrice [3][2] (en supposant que la matrice est indexée à 0) parce que la composante z (qui est négative) dans l’espace de vue devient notre composante w après avoir été multipliée par la matrice de projection :
💡 NB. Veuillez vous référer à cette illustration et notez la différence de direction de l’axe z dans l’espace de la caméra et dans l’espace de découpage. Spoiler : le système de coordonnées droitier devient gaucher.*
Gardons ce modèle de perspective dans notre poche arrière pendant que nous continuons l’histoire de la transformation des sommets à travers deux espaces qui jouent un rôle important pendant le pipeline de rendu - espace de découpage et NDC (coordonnées normalisées).
Mais avant d’y aller, nous avons encore un arrêt… coordonnées homogènes.
Les coordonnées homogènes.
Ah, les coordonnées homogènes m’ont fait peur il y a une semaine. J’ai vite compris qu’ils sont tout sauf effrayants. Ils sont en fait super utiles à avoir dans notre boîte à outils 3D.
Alors, pour commencer notre discussion, prenons l’exemple d’un sommet qui est positionné dans notre triangle d’il y a deux semaines comme suit :
Pourquoi est-ce qu’il y a quatre dimensions ? La position de ce sommet est considérée comme une coordonnée homogène parce qu’il y a une quatrième composante, w. Nous travaillons donc avec eux depuis le début !
On a besoin de cette quatrième dimension pour quelques raisons. On verra comment on les utilise, mais aussi comment le GPU les utilise (pour changer de l’espace de découpage à NDC) dans la prochaine partie.
Les applications
Il y a plusieurs applications qui nous seront immédiatement utiles. Note bien que cette liste que je dresse n’est pas entièrement complète. L’application de coordonnées homogènes est vaste !
La transformation projection
On utilise les coordonnées homogènes afin de travailler dans l’espace projectif.
Prenons un exemple 2D pour simplifier le concept :
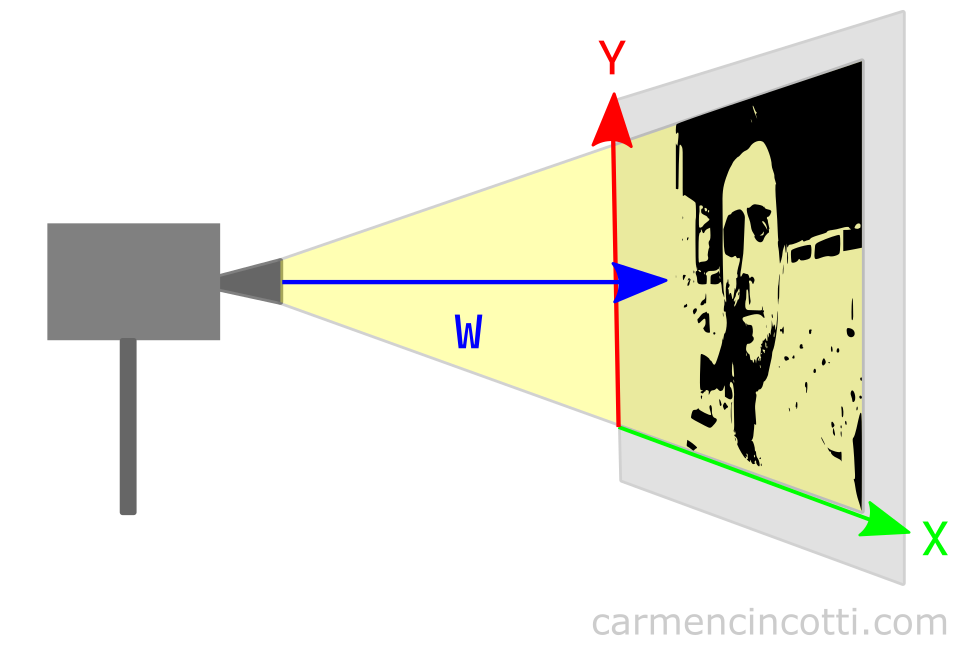
En regardant l’illustration, on peut voir que w a quelque chose à voir avec la projection. Imaginons que l’on rapproche le projecteur de cinéma de l’écran (qui affiche ma tronche).
L’image devrait rétrécir ! D’ailleurs, si l’on éloigne le projecteur de film de l’écran, l’image devrait grossir ! On peut donc en déduire que la composante w affecte l’échelle de l’image par rapport à la projection.
On verra plus tard comment cette valeur est utilisée par notre GPU pour rendre l’image avec une illusion de perspective correcte.
💡 Est-ce que w = 1 tout le temps ?
Je pense que la première question à se poser est : w = 1, qu’est-ce que cela veut dire ?
Comme on vient de le voir, la valeur w décrit l’échelle de nos composantes par rapport à la distance de la projection. Une valeur de 1 signifie donc qu’aucune mise à l’échelle ne se produit. Ainsi, lorsque w = 1, elle n’a aucun effet sur les valeurs des composantes x, y ou z.
Ainsi, définir w = 1 est une valeur initiale très raisonnable. Dans le code, lorsque nous définissons nos sommets, nous définissons la valeur sur 1, ce qui délègue essentiellement la responsabilité de la mise à jour de cette composante à la matrice de projection.
Ainsi, une fois tous les calculs terminés, w ne sera probablement plus égal à 1.
La translation des coordonnées 3D
Cette application est largement utilisée partout dans le monde graphique. En fait, on l’a déjà vue il y a une semaine avec nos matrices 4D lookAt et viewMatrix.
Habituellement, le vecteur de translation s’écrit sous forme de vecteur 3D et qui est considérée comme une transformation affine. En plus, les matrices de rotation et de mise à l’échelle sont également 3D (3x3) :
Est-ce possible de représenter une transformation entière (translation, rotation, échelle) dans une seule matrice ? Oui ! En ajoutant le 4e composante, w, nous exploitons la puissance de la 4e dimension :
Dès que l’on ajoute cette quatrième dimension, nous pouvons alors multiplier ces matrices pour construire une seule matrice :
Où est la matrice de transformation finale dans la forme 4x4. C’est exactement la même forme de notre matrice viewMatrix de la semaine dernière :
💡 Pour en savoir plus, une bonne ressource que je vous recommande de regarder est de la chaine YouTube de Keenan Crane.
L’espace de découpage
L’espace de découpage - Qu’est-ce que ? Je pense que cette illustration peut nous aider à l’éclairer :
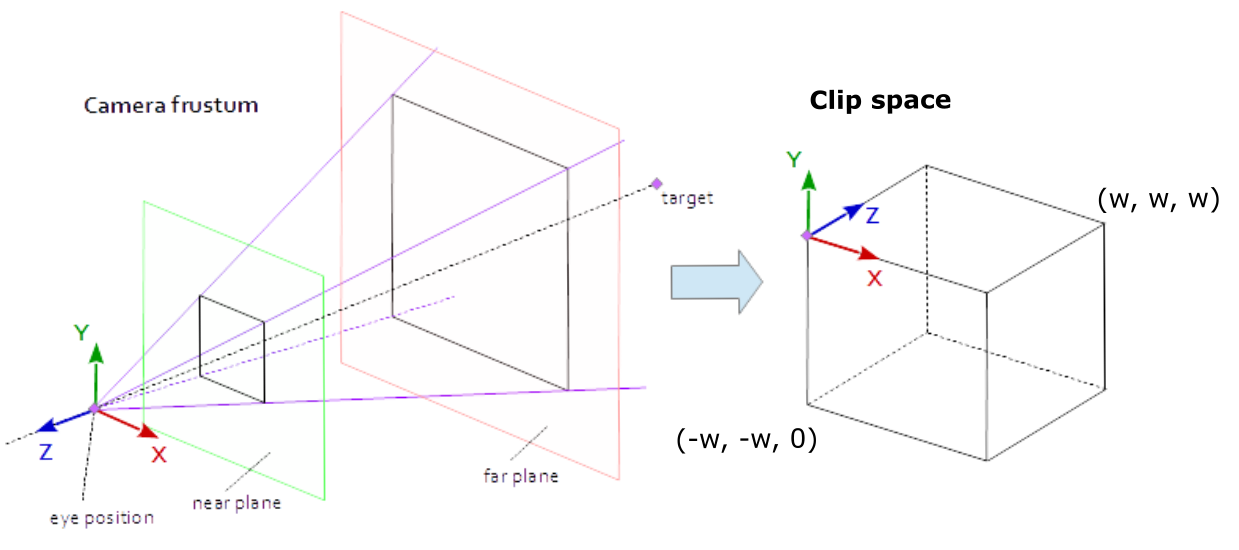
Bref, l’espace de découpage est modélisé comme un prisme, qui s’appelle le volume découpage. S’il y a des sommets d’une primitive qui sont en dehors de cet espace, ils seront rejetés (coupés) par notre GPU. Il le fait afin d’éviter des calculs inutiles puisque nous ne pouvons pas voir ces sommets, de toute façon.
Les dimensions du volume de découpage sont définies comme la boîte englobante suivante : où est la dimension supplémentaire du sommet, ce qui fait du sommet une coordonnée homogène !
Afin d’éviter d’être rejetés par notre GPU, les composantes x, y, et z d’un sommet dans l’espace de découpage doivent remplir ces conditions :
Comment entrer l’espace de découpage
Nos sommets sont positionnés dans l’espace de découpage par nous.
Comment ? Les calculs impliqués dans la transformation de notre sommet positionné dans l’espace modèle en espace de découpage se produisent dans le shader de vertex. En fait, la position que nous définissons en sortie est la position dans l’espace de découpage.
L’équation généralement utilisée dans un shader de vertex est la suivante :
out.position = projectionMatrix * viewMatrix * modelMatrix * inputPosition
où :
- inputPosition - la position du sommet 4D (coordonnée homogène) dans l’espace modèle.
- modelMatrix - la matrice 4x4 qui transforme les sommets d’entrée de l’espace modèle à l’espace monde.
- viewMatrix - la matrice de vue 4x4, qui prend en entrée un point dans l’espace du monde et le résultat est un point dans l’espace de la caméra.
- projectionMatrix - la matrice de projection 4x4, qui prend en entrée un point dans l’espace de la caméra et le résultat est un point projeté dans l’espace de découpage.
Ce qui est un peu déroutant pour moi, c’est le fait que chaque sommet peut avoir une valeur wc différente. On devrait donc considérer l’espace de découpage comme un prisme rectangulaire et que chaque sommet a son propre espace de découpage dans lequel il existe..
💡 Et le triangle qui a des sommets à l’intérieur et à l’extérieur du volume de découpage ?
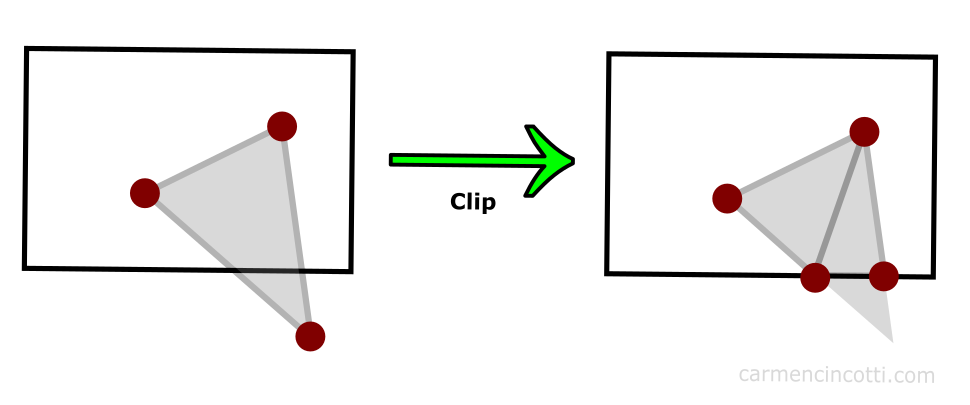
Notre GPU est très malin. À l’aide d’un algorithme (que je n’aborderai pas en profondeur dans cet article), les sommets qui se trouvent en dehors de l’espace de découpage sont coupés, et à leur place, le GPU redessine d’autres sommets :
Le résultat est une primitive coupée, mais toujours présente dans la scène. Ces nouveaux sommets peuvent créer les triangles supplémentaires si le GPU le juge nécessaire.
NDC
Après avoir supprimé les sommets qui tombaient à l’extérieur du volume de découpage, les positions de tous les sommets restants sont normalisées dans un système de coordonnées commun appelé NDC (Coordonnées de l’appareil de normalisation).
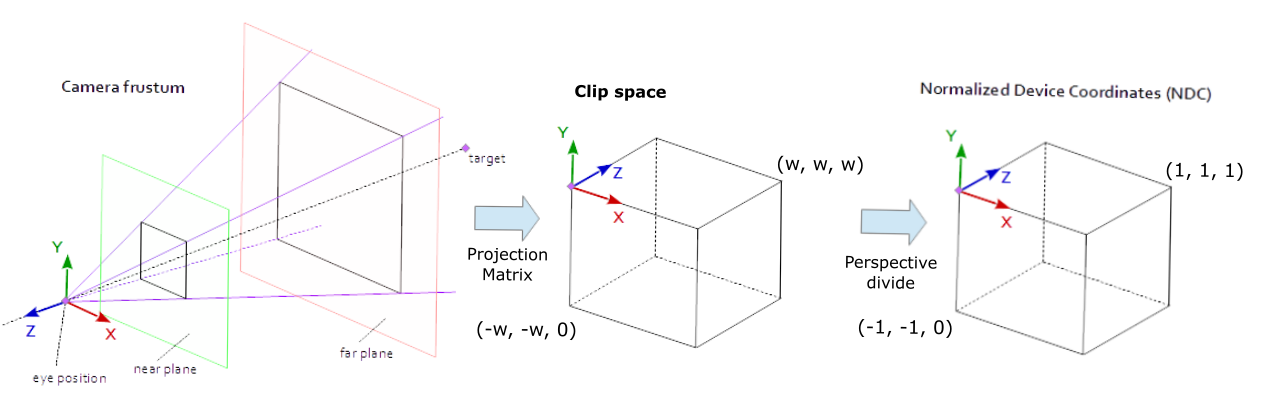
Le GPU fait du travail pour entre dans ce système de coordonnées en faisant une opération appelée division de perspective où toutes les composantes du sommet sont divisées par la composante w.
Rappelez-vous qu’on vient de découper tous les sommets qui se trouvaient en dehors du prisme de dimensions w. Nos composantes doivent donc se situer entre -1 et 1 après les avoir normalisés en divisant les composantes x et y par la composante w. Pour la composante z, les coordonnées normalisées tomberont entre 0 et 1.
⚠️ Chaque API graphique est différent et il faut que vous voyiez les docs de l’API graphique que vous utilisez, mais dans le cas de WebGPU, NDC est comprise entre (-1, -1, 0) et (1, 1, 1).
La suite
Nous continuons cette histoire en voyant comment nous arrivons à l’espace d’écran 2D de NDC !
Des ressources (en français et anglais)
- Stack Exchange - Why is clip space always referred to as “homogeneous clip space”?
- Tom Dalling - Explaining Homogeneous Coordinates & Projective Geometry
- Stack Overflow - No, clip space and NDC space are not the same thing.
- Scratchapixel - The Perspective and Orthographic Projection Matrix
- Songho.ca - OpenGL Projection Matrix
- WebGPU - Point Rasterization
- Keenan Crane - Homogeneous Coordinates
Comments for Coordonnées homogènes, espace de découpage, et NDC | WebGPU
Written by Carmen Cincotti, computer graphics enthusiast, language learner, and improv actor currently living in San Francisco, CA. Follow @CarmenCincotti